
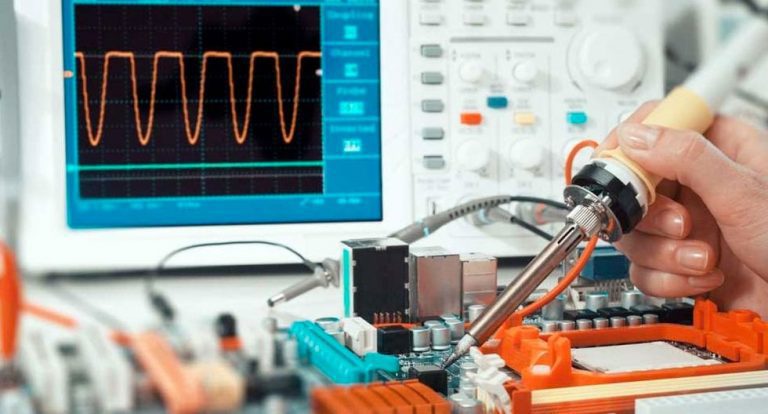

El Osciloscopio es un instrumento de visualización electrónico, representa graficamente las señales eléctricas que pueden variar en el tiempo. Es muy usado en electrónica de señal, frecuentemente junto a un analizador de espectro. Presenta los valores de las señales eléctricas en forma de coordenadas en una pantalla, en la que normalmente el eje X (horizontal) representa tiempos y el eje Y (vertical) representa tensiones.

El Frecuencímetro es un instrumento que sirve para medir la frecuencia, contando el número de repeticiones de una onda en la misma posición en un intervalo de tiempo mediante el uso de un contador que acumula el número de periodos.
Dado que la frecuencia se define como el número de eventos de una clase particular ocurridos en un período, su medida es generalmente sencilla. Según el sistema internacional el resultado se mide en Hertzios (Hz).

El Multímetro, también denominado polímetro1 o tester, es un instrumento eléctrico portátil para medir directamente magnitudes eléctricas activas, como corrientes y potenciales (tensiones), o pasivas, como resistencias, capacidades y otras.
Las medidas pueden realizarse para corriente continua o alterna y en varios márgenes de medida cada una. Los hay analógicos y posteriormente se han introducido los digitales cuya función es la misma, con alguna variante añadida.

El Capacímetro es un equipo de prueba electrónico utilizado para medir la capacidad o capacitancia de los condensadores.
Dependiendo de la sofisticación del equipo, puede simplemente mostrar la capacidad o también puede medir una serie de parámetros tales como las fugas, la resistencia del dieléctrico o la componente inductiva.

El Medidor de Campo o medidor de nivel de señal es un instrumento utilizado en electrónica para medir la intensidad y otros parámetros de una señal de radiofrecuencia.
El instrumento puede transformar las ondas electromagnéticas en una imagen del espectro electromagnético y lo presenta en forma de gráfico.

